



- ແນະນຳ
ເຄື່ອງສົ່ງສັນຍານການວັດແທກລະດັບຂອງແຫຼວແມ່ນເຄື່ອງມືທີ່ສະຫນອງການວັດແທກລະດັບຂອງແຫຼວຢ່າງຕໍ່ເນື່ອງ. ມັນສາມາດຖືກນໍາໃຊ້ເພື່ອກໍານົດລະດັບຂອງແຫຼວຫຼືຂອງແຂງຈໍານວນຫຼາຍໃນເວລາສະເພາະໃດຫນຶ່ງ. ມັນສາມາດວັດແທກລະດັບຂອງແຫຼວຂອງສື່ມວນຊົນເຊັ່ນ: ນ້ໍາ, ຂອງນ້ໍາ viscous ແລະນໍ້າມັນເຊື້ອໄຟ, ຫຼືສື່ແຫ້ງເຊັ່ນຂອງແຂງຫຼາຍແລະຝຸ່ນ.
ເຄື່ອງສົ່ງສັນຍານການວັດແທກລະດັບຂອງແຫຼວສາມາດຖືກນໍາໃຊ້ໃນສະພາບການເຮັດວຽກຕ່າງໆເຊັ່ນ: ຕູ້ຄອນເທນເນີ, ຖັງແລະແມ້ກະທັ້ງແມ່ນ້ໍາ, ສະນຸກເກີແລະນ້ໍາດີ. ເຄື່ອງສົ່ງສັນຍານເຫຼົ່ານີ້ຖືກນໍາໃຊ້ທົ່ວໄປໃນການຈັດການວັດສະດຸ, ອາຫານແລະເຄື່ອງດື່ມ, ພະລັງງານ, ເຄມີ, ແລະອຸດສາຫະກໍາການບໍາບັດນ້ໍາ. ຕອນນີ້ໃຫ້ເຮົາມາເບິ່ງເຄື່ອງວັດລະດັບຂອງແຫຼວທີ່ໃຊ້ທົ່ວໄປຫຼາຍອັນ.
- ເຊັນເຊີລະດັບ submersible
ໂດຍອີງໃສ່ຫຼັກການທີ່ຄວາມກົດດັນ hydrostatic ແມ່ນອັດຕາສ່ວນກັບຄວາມສູງຂອງຂອງແຫຼວ, ເຊັນເຊີລະດັບ submersible ໃຊ້ຜົນກະທົບ piezoresistive ຂອງຊິລິໂຄນກະຈາຍຫຼືເຊັນເຊີເຊລາມິກເພື່ອປ່ຽນຄວາມກົດດັນ hydrostatic ເປັນສັນຍານໄຟຟ້າ. ຫຼັງຈາກການຊົດເຊີຍອຸນຫະພູມແລະການແກ້ໄຂເສັ້ນ, ມັນໄດ້ຖືກປ່ຽນເປັນ 4-20mADC ມາດຕະຖານການສົ່ງອອກສັນຍານປັດຈຸບັນ. ສ່ວນເຊັນເຊີຂອງເຄື່ອງສົ່ງຄວາມກົດດັນ hydrostatic submersible ສາມາດໃສ່ໂດຍກົງເຂົ້າໄປໃນຂອງແຫຼວ, ແລະສ່ວນເຄື່ອງສົ່ງສາມາດຖືກແກ້ໄຂດ້ວຍ flange ຫຼືວົງເລັບ, ດັ່ງນັ້ນມັນສະດວກຫຼາຍໃນການຕິດຕັ້ງແລະການນໍາໃຊ້.
ເຊັນເຊີລະດັບ submersible ແມ່ນເຮັດດ້ວຍອົງປະກອບທີ່ລະອຽດອ່ອນຂອງຊິລິໂຄນແຜ່ກະຈາຍແບບໂດດດ່ຽວ, ເຊິ່ງສາມາດໃສ່ເຂົ້າໄປໃນຖັງຫຼືນ້ໍາໂດຍກົງເພື່ອວັດແທກຄວາມສູງຈາກປາຍເຊັນເຊີໄປຫາຫນ້ານ້ໍາ, ແລະສົ່ງລະດັບນ້ໍາຜ່ານ 4 - 20mA ໃນປະຈຸບັນຫຼືສັນຍານ RS485.

- ເຊັນເຊີລະດັບແມ່ເຫຼັກ
ໂຄງສ້າງ flap ແມ່ເຫຼັກແມ່ນອີງໃສ່ຫຼັກການຂອງທໍ່ by-pass. ລະດັບຂອງແຫຼວໃນທໍ່ຕົ້ນຕໍແມ່ນສອດຄ່ອງກັບສິ່ງທີ່ຢູ່ໃນອຸປະກອນບັນຈຸ. ອີງຕາມກົດຫມາຍ Archimedes, buoyancy ທີ່ເກີດຂຶ້ນໂດຍການລອຍແມ່ເຫຼັກໃນຂອງແຫຼວແລະຄວາມສົມດູນແຮງໂນ້ມຖ່ວງທີ່ເລື່ອນໄດ້ໃນລະດັບຂອງແຫຼວ. ເມື່ອລະດັບຂອງແຫຼວຂອງເຮືອວັດແທກໄດ້ເພີ່ມຂຶ້ນແລະຫຼຸດລົງ, rotary float ໃນທໍ່ຕົ້ນຕໍຂອງເຄື່ອງວັດແທກລະດັບຂອງແຫຼວກໍ່ເພີ່ມຂຶ້ນແລະຫຼຸດລົງ. ເຫຼັກສະນະແມ່ເຫຼັກຖາວອນໃນລອຍໄດ້ຂັບຖັນສີແດງແລະສີຂາວຢູ່ໃນຕົວຊີ້ວັດທີ່ຈະຫັນ 180 °ໂດຍຜ່ານເວທີການເຊື່ອມສະນະແມ່ເຫຼັກ.
ເມື່ອລະດັບຂອງແຫຼວສູງຂຶ້ນ, ເລື່ອນໄດ້ປ່ຽນຈາກສີຂາວໄປເປັນສີແດງ. ເມື່ອລະດັບຂອງແຫຼວຫຼຸດລົງ, ລອຍປ່ຽນຈາກສີແດງເປັນສີຂາວ. ຂອບເຂດສີຂາວ - ແດງແມ່ນຄວາມສູງຕົວຈິງຂອງລະດັບຂອງແຫຼວຂອງຂະຫນາດກາງໃນບັນຈຸ, ເພື່ອຮັບຮູ້ຕົວຊີ້ບອກລະດັບຂອງແຫຼວ.

- ເຊັນເຊີລະດັບຂອງແຫຼວ magnetostrictive
ໂຄງສ້າງຂອງເຊັນເຊີລະດັບຂອງແຫຼວ magnetostrictive ປະກອບດ້ວຍທໍ່ສະແຕນເລດ (ເຫຼັກວັດແທກ), ສາຍ magnetostrictive (waveguide wire), ເລື່ອນລອຍໄດ້ (ມີແມ່ເຫຼັກຖາວອນພາຍໃນ), ແລະອື່ນໆ. ເມື່ອເຊັນເຊີເຮັດວຽກ, ພາກສ່ວນວົງຈອນຂອງເຊັນເຊີຈະກະຕຸ້ນກະແສກໍາມະຈອນຢູ່ໃນສາຍ waveguide, ແລະສາຍສະນະແມ່ເຫຼັກປະຈຸບັນກໍາມະຈອນຈະຖືກສ້າງຂຶ້ນໃນຮອບ waveguide.
float ແມ່ນຈັດລຽງຢູ່ນອກ rod ວັດແທກຂອງ sensor, ແລະ float ຍ້າຍຂຶ້ນແລະລົງຕາມ rod ວັດແທກກັບການປ່ຽນແປງຂອງລະດັບຂອງແຫຼວ. ມີຊຸດຂອງແຫວນແມ່ເຫຼັກຖາວອນພາຍໃນທີ່ເລື່ອນໄດ້. ໃນເວລາທີ່ສະຫນາມແມ່ເຫຼັກປັດຈຸບັນ pulsed ພົບກັບພາກສະຫນາມແມ່ເຫຼັກວົງແມ່ເຫຼັກທີ່ສ້າງຂຶ້ນໂດຍການເລື່ອນໄດ້, ພາກສະຫນາມແມ່ເຫຼັກປະມານ float ໄດ້ມີການປ່ຽນແປງ, ດັ່ງນັ້ນສາຍ waveguide ທີ່ເຮັດດ້ວຍວັດສະດຸ magnetostrictive ສ້າງກໍາມະຈອນຄື້ນ torsional ຢູ່ຕໍາແຫນ່ງຂອງ float ໄດ້. ກໍາມະຈອນແມ່ນສົ່ງກັບຄືນຕາມສາຍ waveguide ໃນຄວາມໄວຄົງທີ່ແລະຖືກກວດພົບໂດຍກົນໄກການຊອກຄົ້ນຫາ. ໂດຍການວັດແທກຄວາມແຕກຕ່າງຂອງເວລາລະຫວ່າງການສົ່ງກໍາມະຈອນໃນປະຈຸບັນແລະຄື້ນບິດ, ຕໍາແຫນ່ງຂອງລອຍສາມາດຖືກກໍານົດຢ່າງຖືກຕ້ອງ, ນັ້ນແມ່ນ, ຕໍາແຫນ່ງຂອງພື້ນຜິວຂອງແຫຼວ.
- ເຊັນເຊີລະດັບວັດສະດຸຮັບຄວາມຖີ່ວິທະຍຸ
ການຍອມຮັບຄວາມຖີ່ວິທະຍຸແມ່ນເຕັກໂນໂລຢີການຄວບຄຸມລະດັບໃຫມ່ທີ່ພັດທະນາຈາກການຄວບຄຸມລະດັບ capacitive, ເຊິ່ງມີຄວາມຫນ້າເຊື່ອຖື, ຖືກຕ້ອງແລະໃຊ້ໄດ້ຫຼາຍຂຶ້ນ. ມັນເປັນການຍົກລະດັບເຕັກໂນໂລຊີການຄວບຄຸມລະດັບ capacitive.
ອັນທີ່ເອີ້ນວ່າການຍອມຮັບຄວາມຖີ່ວິທະຍຸຫມາຍຄວາມວ່າ reciprocal ຂອງ impedance ໃນໄຟຟ້າ, ເຊິ່ງປະກອບດ້ວຍອົງປະກອບຕ້ານທານ, ອົງປະກອບ capacitive ແລະອົງປະກອບ inductive. ຄວາມຖີ່ວິທະຍຸແມ່ນຄື້ນວິທະຍຸຂອງເຄື່ອງວັດແທກລະດັບຂອງແຫຼວທີ່ມີຄວາມຖີ່ສູງ, ສະນັ້ນການຮັບເອົາຄວາມຖີ່ວິທະຍຸສາມາດເຂົ້າໃຈໄດ້ວ່າເປັນການວັດແທກການເຂົ້າກັບຄື້ນວິທະຍຸຄວາມຖີ່ສູງ.
ໃນເວລາທີ່ເຄື່ອງມືເຮັດວຽກ, ເຊັນເຊີຂອງເຄື່ອງມືປະກອບເປັນຄ່າ admittance ກັບກໍາແພງຫີນແລະຂະຫນາດກາງວັດແທກ. ເມື່ອລະດັບວັດສະດຸປ່ຽນແປງ, ມູນຄ່າການຍອມຮັບຈະປ່ຽນແປງຕາມຄວາມເຫມາະສົມ. ໜ່ວຍວົງຈອນຈະປ່ຽນຄ່າການຮັບທີ່ວັດແທກເປັນສັນຍານລະດັບວັດສະດຸເພື່ອຮັບຮູ້ການວັດແທກລະດັບວັດສະດຸ.

- ເຄື່ອງວັດແທກລະດັບ Ultrasonic
ເຄື່ອງວັດແທກລະດັບ Ultrasonic ເປັນເຄື່ອງມືລະດັບດິຈິຕອນທີ່ຄວບຄຸມໂດຍ microprocessor. ໃນການວັດແທກ, ຄື້ນ ultrasonic ກໍາມະຈອນແມ່ນຖືກສົ່ງໄປໂດຍເຊັນເຊີ, ແລະຄື້ນສຽງໄດ້ຖືກຮັບໂດຍເຊັນເຊີດຽວກັນຫຼັງຈາກຖືກສະທ້ອນໂດຍພື້ນຜິວວັດຖຸ, ແລະປ່ຽນເປັນສັນຍານໄຟຟ້າ. ໄລຍະຫ່າງລະຫວ່າງເຊັນເຊີແລະວັດຖຸທີ່ຢູ່ພາຍໃຕ້ການທົດສອບແມ່ນໄດ້ຖືກຄິດໄລ່ໂດຍທີ່ໃຊ້ເວລາລະຫວ່າງການສົ່ງແລະການຮັບຂອງຄື້ນສຽງ.
ຂໍ້ດີແມ່ນບໍ່ມີສ່ວນທີ່ສາມາດເຄື່ອນທີ່ດ້ວຍກົນຈັກ, ຄວາມຫນ້າເຊື່ອຖືສູງ, ການຕິດຕັ້ງງ່າຍດາຍແລະສະດວກ, ການວັດແທກບໍ່ຕິດຕໍ່, ແລະບໍ່ໄດ້ຮັບຜົນກະທົບຈາກຄວາມຫນືດແລະຄວາມຫນາແຫນ້ນຂອງແຫຼວ.
ຂໍ້ເສຍແມ່ນວ່າຄວາມຖືກຕ້ອງແມ່ນຂ້ອນຂ້າງຕ່ໍາ, ແລະການທົດສອບແມ່ນງ່າຍທີ່ຈະມີພື້ນທີ່ຕາບອດ. ມັນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ວັດແທກຄວາມກົດດັນຂອງເຮືອແລະຂະຫນາດກາງທີ່ປ່ຽນແປງໄດ້.

- ເຄື່ອງວັດແທກລະດັບ radar
ຮູບແບບການເຮັດວຽກຂອງເຄື່ອງວັດແທກລະດັບຂອງແຫຼວ radar ກໍາລັງສົ່ງສະທ້ອນເຖິງການໄດ້ຮັບ. ເສົາອາກາດຂອງເຄື່ອງວັດແທກລະດັບຂອງແຫຼວ radar ປ່ອຍຄື້ນແມ່ເຫຼັກໄຟຟ້າ, ເຊິ່ງສະທ້ອນໃຫ້ເຫັນໂດຍຫນ້າດິນຂອງວັດຖຸທີ່ວັດແທກໄດ້ແລະຫຼັງຈາກນັ້ນໄດ້ຮັບໂດຍເສົາອາກາດ. ເວລາຂອງຄື້ນແມ່ເຫຼັກໄຟຟ້າຈາກການສົ່ງໄປຫາການຮັບແມ່ນອັດຕາສ່ວນກັບໄລຍະຫ່າງກັບລະດັບຂອງແຫຼວ. ເຄື່ອງວັດລະດັບຂອງແຫຼວ radar ບັນທຶກເວລາຂອງຄື້ນກໍາມະຈອນ, ແລະຄວາມໄວການສົ່ງຂອງຄື້ນແມ່ເຫຼັກໄຟຟ້າແມ່ນຄົງທີ່, ຫຼັງຈາກນັ້ນໄລຍະຫ່າງຈາກລະດັບຂອງແຫຼວກັບເສົາອາກາດ radar ສາມາດຄິດໄລ່ໄດ້, ເພື່ອທີ່ຈະຮູ້ລະດັບຂອງແຫຼວໃນລະດັບຂອງແຫຼວ.
ໃນການນໍາໃຊ້ພາກປະຕິບັດ, ມີສອງຮູບແບບຂອງລະດັບຂອງແຫຼວ radar, ຄືການປັບຄວາມຖີ່ຂອງຄື້ນຕໍ່ເນື່ອງແລະຄື້ນກໍາມະຈອນ. ເຄື່ອງວັດແທກລະດັບຂອງແຫຼວທີ່ມີເຕັກໂນໂລຊີຄື້ນຢ່າງຕໍ່ເນື່ອງ modulated ຄວາມຖີ່ມີການບໍລິໂພກພະລັງງານສູງ, ລະບົບສາຍສີ່ແລະວົງຈອນເອເລັກໂຕຣນິກສະລັບສັບຊ້ອນ. ເຄື່ອງວັດແທກລະດັບຂອງແຫຼວທີ່ມີເທກໂນໂລຍີຄື້ນ radar pulse ມີການໃຊ້ພະລັງງານຕ່ໍາ, ສາມາດຂັບເຄື່ອນດ້ວຍລະບົບສອງສາຍຂອງ 24 VDC, ງ່າຍຕໍ່ການບັນລຸຄວາມປອດໄພພາຍໃນ, ຄວາມຖືກຕ້ອງສູງແລະລະດັບການນໍາໃຊ້ທີ່ກວ້າງກວ່າ.

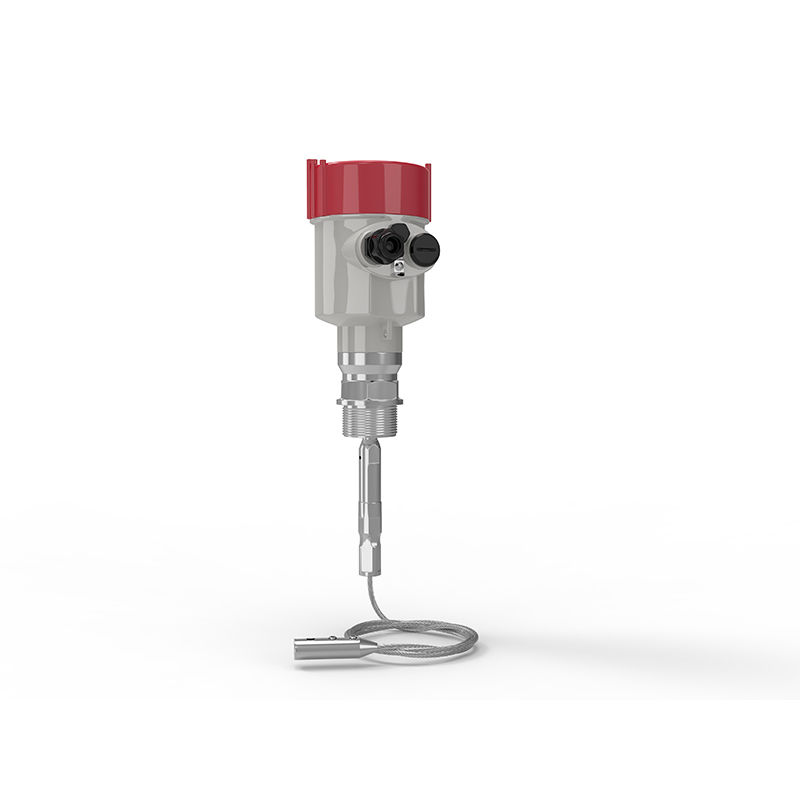
- ເຄື່ອງວັດແທກລະດັບ radar ຄື້ນຄູ່ມື
ຫຼັກການເຮັດວຽກຂອງເຄື່ອງສົ່ງສັນຍານລະດັບ radar wave ນໍາພາແມ່ນຄືກັນກັບເຄື່ອງວັດແທກລະດັບ radar, ແຕ່ມັນຈະສົ່ງ microwave pulses ຜ່ານສາຍ sensor ຫຼື rod. ສັນຍານມົນຕີພື້ນຜິວຂອງແຫຼວ, ຫຼັງຈາກນັ້ນກັບຄືນໄປຫາເຊັນເຊີ, ແລະຫຼັງຈາກນັ້ນໄປຮອດທີ່ຢູ່ອາໄສເຄື່ອງສົ່ງ. ເອເລັກໂຕຣນິກທີ່ປະສົມປະສານຢູ່ໃນທີ່ຢູ່ອາໄສຂອງເຄື່ອງສົ່ງສັນຍານກໍານົດລະດັບຂອງແຫຼວໂດຍອີງໃສ່ເວລາທີ່ມັນໃຊ້ສໍາລັບສັນຍານທີ່ຈະເດີນທາງໄປຕາມເຊັນເຊີແລະກັບຄືນອີກເທື່ອຫນຶ່ງ. ປະເພດຂອງເຄື່ອງສົ່ງສັນຍານລະດັບເຫຼົ່ານີ້ໄດ້ຖືກນໍາໃຊ້ໃນການນໍາໃຊ້ອຸດສາຫະກໍາໃນທຸກຂົງເຂດຂອງເຕັກໂນໂລຊີຂະບວນການ.
ເວລາປະກາດ: 15-12-2021